- Home
-
Product
 Single mode line
Single mode lineAt present, most glove production lines use manual inspection and finished product sampling to judge and screen out defective gloves. Facing a production line with a single-side production speed of 150-200 pieces/minute, 5-7 gloves need to be inspected per second. First of all, the inspection speed is far behind the production speed of the production line; secondly, due to human subjectivity, each It is difficult to unify individual testing standards, and the visual fatigue of human eyes after staring at gloves for a long time will also lead to a large number of missed gloves; in the end, manual inspection often can only see one side of the gloves, and it is impossible to conduct a comprehensive inspection of the gloves.
 Dual mode line
Dual mode lineUsing AI artificial intelligence deep learning algorithm, it can detect damage, oil stains and dirty spots on gloves during sports, automatically identify defects and accurately remove them. It can accurately detect defective gloves such as damage, oil stains and dirty spots, and can automatically remove defective gloves. False detection rate ≤0.5% (5 per thousand, no more than 5 false detections in 1,000 gloves)
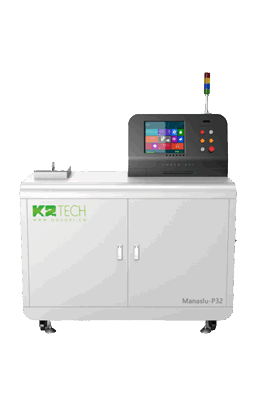
 Optical high-speed automatic detection machine for appearance defects of hard capsules
Optical high-speed automatic detection machine for appearance defects of hard capsules适用于胶囊生产厂和制药厂00#至4#空心胶囊外观缺陷检测、内部缺陷检测和颜色分拣。可实现透明胶囊、半透明胶囊、有色胶囊、植物胶囊等所有检测。操作界面采用工业触摸屏,操作简易,降低了对工人文化水平的要求。采用进口气动元件,使用寿命是国产气动元件的三倍。采用嵌入式无风扇工业计算机,体积小,消除因环境因素造成的计算机死机故障。影像系统和传动系统电气隔离,并采取电气双保险,以保证精密元器件不受损坏。能够24小时连续生产。
 高速滴丸外观缺陷光学自动检测设备
高速滴丸外观缺陷光学自动检测设备专用于滴丸外观缺陷检测,常见缺陷包括气泡、空丸、实心、斑点、偏大、偏小、混料、黑点、圆度不饱满、缺料、拖尾、混色等。自动上料、排序、拍照和NG品分拣。操作界面采用工业触摸屏,操作简易,降低了对工人文化水平的要求。实现7*24小时连续生产。
 烟用爆珠外观缺陷光学自动检测设备
烟用爆珠外观缺陷光学自动检测设备专用于烟用爆珠外观缺陷检测,常见缺陷包括气泡、空丸、实心、斑点、偏大、偏小、混料、黑点、圆度不饱满、缺料、拖尾、混色等。采用多角度检测,确保检测准确性。自动上料、排序、拍照和NG品分拣。操作界面采用工业触摸屏,操作简易。能够7*24小时连续生产。
 烟用爆珠尺寸形态测试仪
烟用爆珠尺寸形态测试仪用于烟用爆珠的高精度直径测量,并依此计算烟用爆珠圆度。采用非接触测量方式,有效消除传统接触式测量方法的机械误差。采用多维旋转测量技术,确保烟用爆珠无死角圆度测量。操作界面简易,降低了对工人文化水平的要求。具有数据实时统计功能,便于针对性分析产品质量。能够7*24小时连续生产。
 Optical Automatic Detection Robot for Appearance Defects of Wind Roller
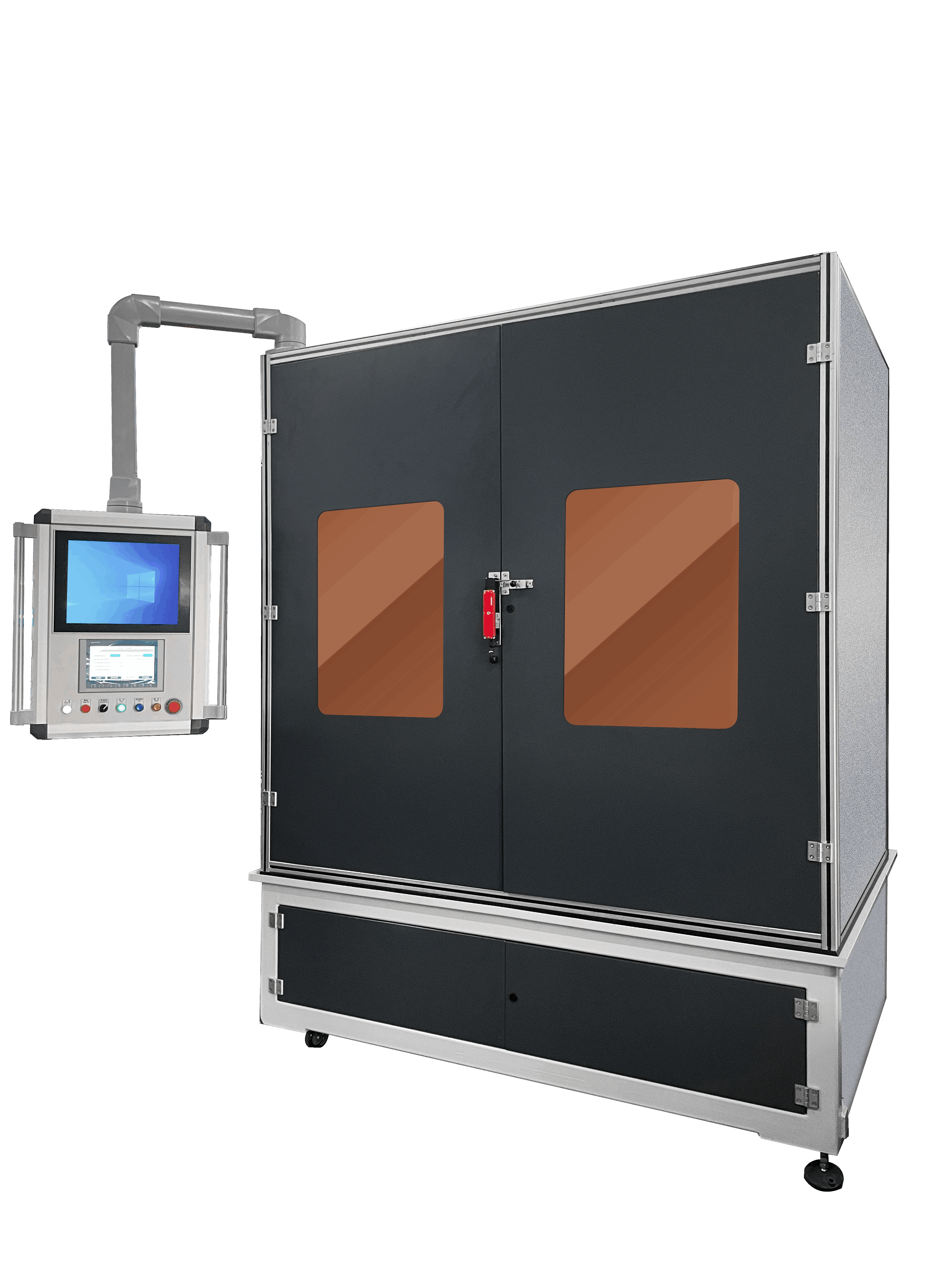
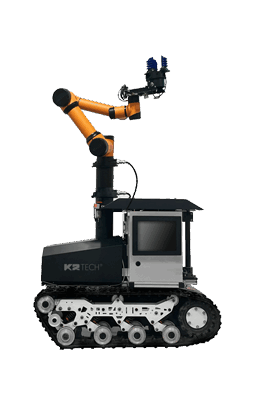
Optical Automatic Detection Robot for Appearance Defects of Wind RollerOptical Automatic Detection Robot for Appearance Defects of Wind Roller是专业检测中大型滚子外圆、两端、凹穴和倒角的外观缺陷的检测设备。使用Robot control滚子移动,成功避免了大滚子的二次损伤。速度达到2000件每小时,可在各种环境下进行7*24小时不间断工作。先进的检测技术使检测功能更齐全,友好的人机界面使人工操作更便捷,
 Optical Automatic Detection Robot for Appearance Defects of XL Wind Roller
Optical Automatic Detection Robot for Appearance Defects of XL Wind RollerOptical Automatic Detection Robot for Appearance Defects of XL Wind Roller是专业检测中大型滚子外圆、两端、凹穴和倒角的外观缺陷的检测设备。使用Robot control滚子移动,成功避免了大滚子的二次损伤。速度最快30秒一件,可在各种环境下进行7*24小时不间断工作。先进的检测技术使检测功能更齐全,友好的人机界面使人工操作更便捷,
-
Solutions

- About Us
- Service support
- Contact us








-
Product
 Machine vision
轴承滚子
Enameled wire 滚针外观缺陷光学自动检测设备(Choyo-R21) Robot for Optical Automatic Detection of Large Roller Appearance Defects Aligning roller轴承外观缺陷光学自动检测设备 超Robot for Optical Automatic Detection of Large Roller Appearance Defects 套圈外观缺陷光学自动检测设备 轴承防尘盖外观缺陷光学自动检测设备 轴承成品外观缺陷光学自动检测设备 钢球外观缺陷光学自动检测设备 滚子自动上料机 滚子在线雾化涂油机 滚子在线清洗烘干机
Machine vision
轴承滚子
Enameled wire 滚针外观缺陷光学自动检测设备(Choyo-R21) Robot for Optical Automatic Detection of Large Roller Appearance Defects Aligning roller轴承外观缺陷光学自动检测设备 超Robot for Optical Automatic Detection of Large Roller Appearance Defects 套圈外观缺陷光学自动检测设备 轴承防尘盖外观缺陷光学自动检测设备 轴承成品外观缺陷光学自动检测设备 钢球外观缺陷光学自动检测设备 滚子自动上料机 滚子在线雾化涂油机 滚子在线清洗烘干机 -
Solutions
-
About Us
-
Service support
- Contact us