- Home
-
Product
 Single mode line
Single mode lineAt present, most glove production lines use manual inspection and finished product sampling to judge and screen out defective gloves. Facing a production line with a single-side production speed of 150-200 pieces/minute, 5-7 gloves need to be inspected per second. First of all, the inspection speed is far behind the production speed of the production line; secondly, due to human subjectivity, each It is difficult to unify individual testing standards, and the visual fatigue of human eyes after staring at gloves for a long time will also lead to a large number of missed gloves; in the end, manual inspection often can only see one side of the gloves, and it is impossible to conduct a comprehensive inspection of the gloves.
 Dual mode line
Dual mode lineUsing AI artificial intelligence deep learning algorithm, it can detect damage, oil stains and dirty spots on gloves during sports, automatically identify defects and accurately remove them. It can accurately detect defective gloves such as damage, oil stains and dirty spots, and can automatically remove defective gloves. False detection rate ≤0.5% (5 per thousand, no more than 5 false detections in 1,000 gloves)
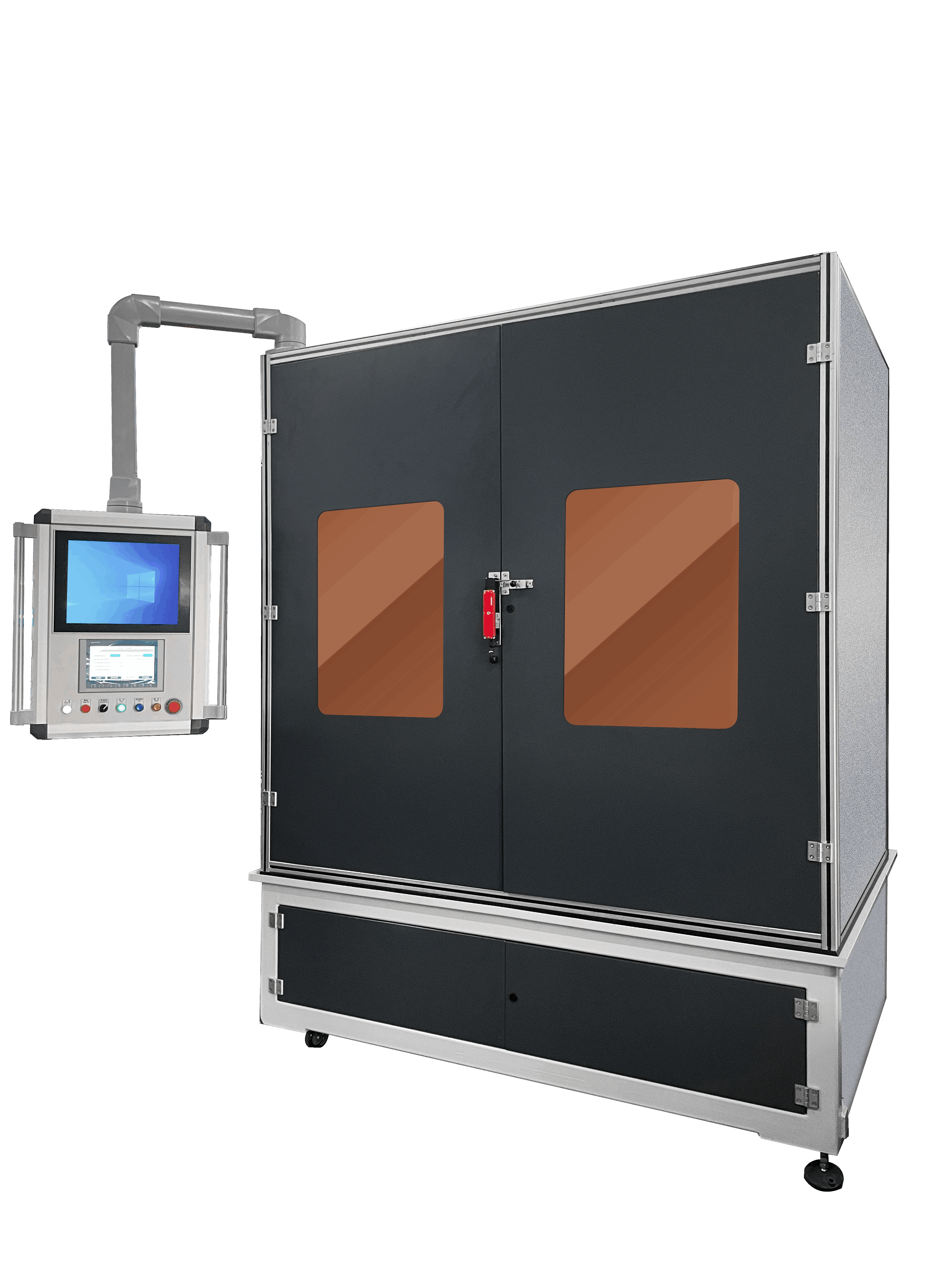
 Optical Automatic Detection Robot for Appearance Defects of Wind Roller
Optical Automatic Detection Robot for Appearance Defects of Wind RollerOptical Automatic Detection Robot for Appearance Defects of Wind Roller是专业检测中大型滚子外圆、两端、凹穴和倒角的外观缺陷的检测设备。使用Robot control滚子移动,成功避免了大滚子的二次损伤。速度达到2000件每小时,可在各种环境下进行7*24小时不间断工作。先进的检测技术使检测功能更齐全,友好的人机界面使人工操作更便捷,
 Optical Automatic Detection Robot for Appearance Defects of XL Wind Roller
Optical Automatic Detection Robot for Appearance Defects of XL Wind RollerOptical Automatic Detection Robot for Appearance Defects of XL Wind Roller是专业检测中大型滚子外圆、两端、凹穴和倒角的外观缺陷的检测设备。使用Robot control滚子移动,成功避免了大滚子的二次损伤。速度最快30秒一件,可在各种环境下进行7*24小时不间断工作。先进的检测技术使检测功能更齐全,友好的人机界面使人工操作更便捷,
-
Solutions

- About Us
- Service support
- Contact us








-
Product
 Machine vision
轴承滚子
Enameled wire 滚针外观缺陷光学自动检测设备(Choyo-R21) Robot for Optical Automatic Detection of Large Roller Appearance Defects Aligning roller轴承外观缺陷光学自动检测设备 超Robot for Optical Automatic Detection of Large Roller Appearance Defects 套圈外观缺陷光学自动检测设备 轴承防尘盖外观缺陷光学自动检测设备 轴承成品外观缺陷光学自动检测设备 钢球外观缺陷光学自动检测设备 滚子自动上料机 滚子在线雾化涂油机 滚子在线清洗烘干机
Machine vision
轴承滚子
Enameled wire 滚针外观缺陷光学自动检测设备(Choyo-R21) Robot for Optical Automatic Detection of Large Roller Appearance Defects Aligning roller轴承外观缺陷光学自动检测设备 超Robot for Optical Automatic Detection of Large Roller Appearance Defects 套圈外观缺陷光学自动检测设备 轴承防尘盖外观缺陷光学自动检测设备 轴承成品外观缺陷光学自动检测设备 钢球外观缺陷光学自动检测设备 滚子自动上料机 滚子在线雾化涂油机 滚子在线清洗烘干机 -
Solutions
-
About Us
-
Service support
- Contact us

 There is no need to set points in advance, and the robot arm can be controlled in real time to go to different points through calculation.
The vision system identifies obstacles and the robotic arm automatically avoids them.
Meet flexible production.
There is no need to set points in advance, and the robot arm can be controlled in real time to go to different points through calculation.
The vision system identifies obstacles and the robotic arm automatically avoids them.
Meet flexible production.